Tom Heyning joined the Arctic Reflections crew for the third field test in Qikiqtarjuaq, Nunavut. A recent graduate from Amsterdam University College, where he followed a programme focused on mathematics and computation, Tom was responsible for drone data collection during the field test. In this blog, he shares what it was really like to collect data firsthand, and the unexpected challenges that come from data collection with drones in a cold, stark white landscape.

In my degree and analysis work, I am often reliant on data that has been collected by other people. It is easy to take this data for granted, or even to complain that the collection method does not quite meet your needs from the comfort of your office. Being responsible of data collection during our field test in the high Arctic has certainly helped dispel this lack of gratitude.
Gearing up
Leaving aside the actual data collection for now, the field test already posed challenges for me, as it was my first time in the Arctic. Navigating the cold was a challenge, as expected, but when fully layered up with my parkas, snow pants, and boots it was manageable once I got used to having doubled in size. Suitably dressed and out in the field, my task was to collect drone imagery that could later be stitched together to create daily maps of our field test location. To prepare for this, with the help from research colleagues at University College London (UCL), we designed an imaging and post processing procedure in the Netherlands. I also conducted many test-runs in the open areas north of Amsterdam.

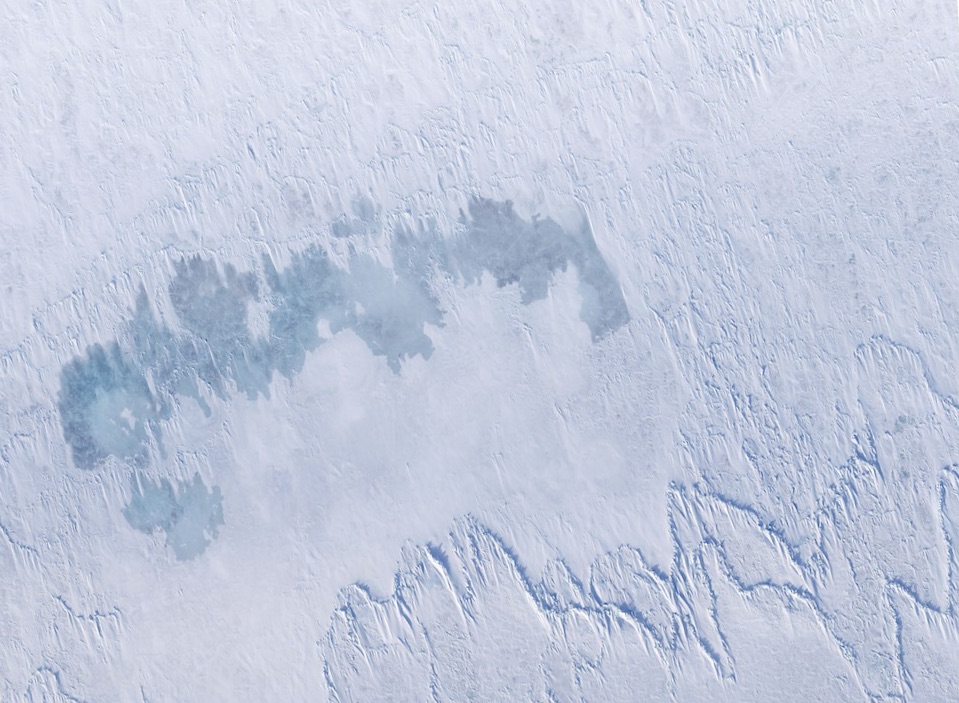
The goal of these maps was twofold: to create a visual record that would allow us to accurately track the scale of our pumping operations, and to contextualise the ice and weather data collected by our measurement stations. This field test marked the first implementation of such an automated procedure, which was designed to produce structured data that would be significantly easier to analyse.
Predictably, operating the drone in the Arctic was very different from flying it over North Holland’s greener pastures. Many of the challenges we anticipated – mainly the decreased performance of cold batteries and the balancing act between keeping the fingertips warm and at the same time being able to use a touch screen – were manageable. We overcame the first of these challenges by cutting holes into the cases that the drones were stored in so we could wedge hand warmers against the batteries to keep them warm; on days without fog, this worked well. We used a similar approach for the drone controllers, which we kept in a heated plastic container in an insulated bag.
A world without contrast

The issue of cold hands was partially solved by wearing touchscreen-compatible glove liners and using gloves with fingertips that could fold open to allow me to use my index finger and thumb. While this worked quite well, the tips our local sea ice experts gave us for bringing warmth back to our fingers were even better.
What we had not anticipated were the struggles that the drone would have with the lack of contrast, especially on cloudy days where virtually everything was white. The absence of distinctive features caused the drone’s collision detection to struggle; it would often think it was about to run into something even though it was flying in open air, which would cause it to stop flying or take a detour. This issue did not arise whilst capturing images, but when the automatic return-to-home feature was triggered by a low battery level, the drone would fly back very slowly and waste energy dodging non-existent obstacles. I often had to intervene in the flight to make sure the drone made it home or landed somewhere we could find it.
Navigating the fog

The frozen fog we encountered a couple of times was also an unexpected obstacle. This cold mist caused the drone’s temperature to drop much more rapidly, to the extent that the algorithm responsible for the automated return-to-home trigger was no longer reliable. The motors also faced issues with ice condensation on the blades, further decreasing efficiency and risking motor overload, which could have led to it crashing. As the fog also negatively impacted data quality, we decided not to fly under these conditions – the risks were not worth it.
Looking back on the field test (in Delft’s warm spring sun), I am very pleased that we were able to overcome the challenging conditions and produce high resolution maps. They have allowed us to better track the impact of our ice thickening method and were well worth the effort!